|
Jason-II, ROV-Remotely Operated Vehicle
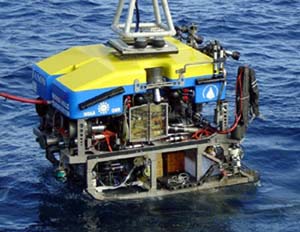 Jason/Medea is a ROV system designed and built by WHOI- Wood Hole Oceanographic Institution for scientific investigation of the deep ocean and seafloor. It is a dual vehicle system, with Medea serving in a tether management role that decouples Jason from surface motion. Jason/Medea is a ROV system designed and built by WHOI- Wood Hole Oceanographic Institution for scientific investigation of the deep ocean and seafloor. It is a dual vehicle system, with Medea serving in a tether management role that decouples Jason from surface motion.
Together they offer wide area survey capabilities with Jason-II as a precision multi-sensory imaging and sampling platform. Both Medea and Jason-II are designed to operate to a maximum depth of 6,500 meters (21,385 feet), are transportable, and can be operated from a variety of vessels.
Movements of the support ship maneuver Medea, utilizing dynamic positioning. Jason-II is propelled by six DC brushless electric thrusters that provide about 600 pounds thrust in the vertical, longitudinal and lateral directions. The vehicle has excellent passive stability in pitch and roll. Jason-II is designed for detailed survey and sampling tasks that require a high degree of maneuverability. It weighs about 8,000 pounds (3,630 kg) in air but is neutrally buoyant at depth.
Jason-II is connected to Medea by a neutrally buoyant tether that is 0.84" in diameter and approximately 35 meters long. Like the tow cable, it also uses three copper conductors and three single mode optical fibers, but uses Spectra fibers to provide strength while reducing size and weight. The tether has a breaking strength of 41,000 lb. Medea weighs 800 pounds in water and is maneuvered by controlling the surface ship’s position within a dynamic positioning reference frame.
Both have been designed to be superior real time optical imaging platforms with high quality cameras and lighting. The vehicles work together to provide lighting for each other in a fashion not commonly available in other submersible systems. Medea is configured with a 1-chip color camera and a silicon intensified target (SIT) black & white camera for terrain identification and visual location of Jason-II when both are operating.
Jason Jr.
 A prototype of Jason called Jason Jr. was used with Alvin (DSV) to survey the wreck of RMS Titanic in 1986. A prototype of Jason called Jason Jr. was used with Alvin (DSV) to survey the wreck of RMS Titanic in 1986.
Back to History Index
 |
Guyana |
1995 |
ROV-Remote Operated Vehicle Jason (USA) |
 |
Palau |
1998 |
Deep sea robots, Jason jr. inspects sunken Titanic in 1986 (souvenir sheet) |
 |
Somaliland, Rep. |
2000 |
Submersible Jason Jr. inspects sunken Titanic (ROV) |
|